발췌: 네이버 지식인
http://kin.naver.com/qna/detail.nhn?d1id=11&dirId=1113&docId=61704927&qb=6riw7Jq46riwIOyijO2RnCDsnbTrj5k=&enc=utf8§ion=kin&rank=2&search_sort=0&spq=0&pid=RXu24spySD8ssc3F4Psssssssus-372678&sid=UuC0LwpyVlgAADSBEqs


저 사각형을요 y=(2/3)x+3의 직선에 대칭으로 뭐랄까 넘겨야된다고 해야되나? 반대로 뒤집어야되거든요
그때 저 파란색 넘긴 네모의 좌표를 어떻게 구하나요? 방법을 알려주세요
답변이 만족되면 아주 빠른채택해드립니다
답변이 급한건 아니니 상세하게 알려주셨으면 좋겠습니다 하나하나 과정을요..
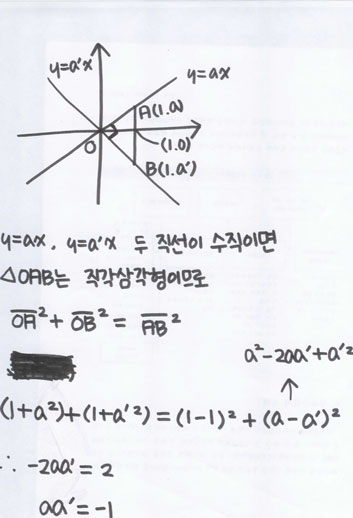
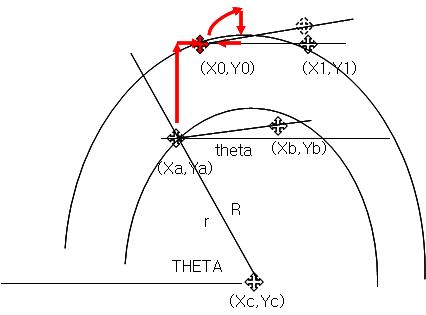
점 P(x , y)와 직선 L : y = ax + b 에 대칭인 점을 점 Q(x' , y') 라 둡시다.
그러면 직선 L 은 선분 PQ 의 수직이등분선이 됩니다.
따라서 PQ 의 중점은 직선 L 위에 있으며 선분 PQ와 직선 L 의 기울기의 곱은 -1 이 됩니다.
선분 PQ 의 중점은 ( (x+x')/2 , (y+y')/2 ) 이며 이 점이 직선 L 위에 존재하므로
(y+y')/2 = a(x+x')/2 + b --- ①
선분 PQ 의 기울기는 (y'-y)/(x'-x) , 직선 L 의 기울기는 a 이므로
a(y'-y)/(x'-x) = -1 --- ②
①, ②식을 정리하면
ax' - y' + ax - y + 2b = 0 --- ③
x' + ay' - x - ay = 0--- ④
a×③ + ④
(a²+1)x' + (a²-1)x - 2ay + 2ab = 0
a×④ - ③
(a²+1)y' - 2ax + (1-a²)y - 2b = 0
정리하면


여기에 a = 2/3 , b = 3 , (x,y) = (2,2) , (2,4) , (4,2) , (4,4) 를 대입하면 되겠죠.
중요한건 저걸 공식이라고 외우는게 아니라 직선에 대칭인 점을 구하는 방법을 아셔야 겠죠.
직선에 대한 좌표의 이동의 경우
두가지로 구합니다 (이동전 A , 이동후 A')
두점의 중점이 직선위의 점이라는 것과 (점과 직선사이의 거리가 같다)
두점을 이은 선분과 직선은 수직이다는 것입니다 (수직인 두직선의 기울기의 곱은 -1)
이 두가지로 구합니다
먼저 (2,2) 를 이동한다라고 하면은
A' 를 (X,Y) 라고 하면은
먼저 두 점의 중점이 직선위에 있으므로 중점이 ( (X+2)/2 , (Y+2)/2 ) 가 직선위에 있으므로
(Y+2)/2 = 2/3 (X+2)/2 + 3
Y + 2 = 2/3 X + 4/3 + 3
Y = 2/3 X + 7/3 이 되고
두점을 이은 선분과 직선이 수직이라는 것으로
두점의 기울기가 -3/2 라는 것을 알수가 있습니다
그래서 두점사이의 기울기를 구하면은 (분자/분모 로 보겠슴)
(Y-2)/(X-2) = -3/2
2(Y-2) = -3(X-2)
2Y - 4 = -3X + 6
Y = - 3/2 X + 5 가 되고 처음에 구한 식과 연립을 하면은 X , Y 값이 나오게 됩니다 ..
이렇게 나머지 점도 대입을 하면은 됩니다.