하기 사이트에서 발췌하였습니다. 문제가 된다면 삭제하겠습니다.
[출처] UVW Table을 이용한 Marker Align|작성자 엘비스
[요약] 부품과 부품 사이에 정밀한 결합이 필요할 때 보정(Align)이 필요합니다.
(예로, AMOLED Cell Head와 검사장비의 Contact 등)
수십 um 정도의 정밀도가 필요하므로, XY,Theta보나 UVW Table을 많이 사용합니다.
이 때 필요한 Align 방법에 대하여 설명합니다.
[이론]
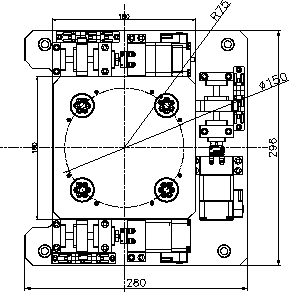
1) Table의 구조
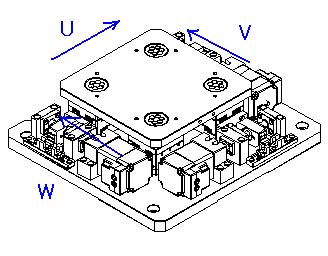
위의 그림과 같이 3축의 모터를 사용하며 U축은 X츅이며 VW를 같은 수치로 움직이면 Y축으로 사용됩니다. Theta 회전은 UVW를 일정 수치 많큼 이동하면 됩니다.
2) 문제점
문제는 정교한 대신에 Align하는 방법이 간단하지 않다는 점입니다. Theta 회전에 UVW 축의 이동이 필요함으로 회전후 마커의 위치를 예상하기 어렵습니다.
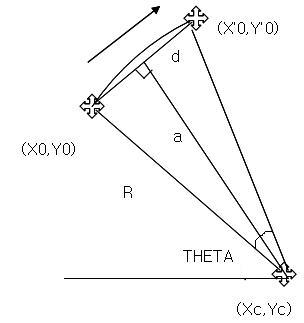
이론적으로 Theta 회전후 위치를 계산하려면, 중심점과 마커의 거리(R)과 마커와 중심점, 수평선의 각도를 알아야 합니다.
Theta Calibration에 의하여 회전시 위치값을 이용하여 Best Fit Circle을 구하면 중심점(Xc,Yc)를 구할 수 있지만 카메라의 상 관찰 할 수 있는 범위가 워낙 작으므로 오차가 많이 발생합니다.
즉 관찰 범위는 2-3도(거리로 3-6mm) 정도인데 반지름(R)은 약 150~220mm입니다.
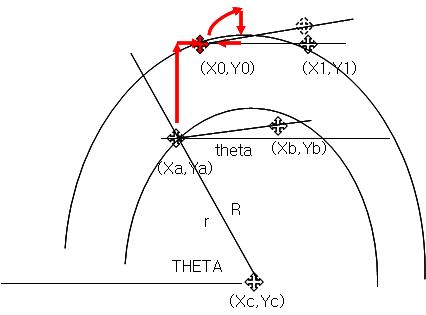
Marker와 중심선, 수평선의 내각도 마커가 놓인 위치마다 계산되어야 합니다.
3) 전략
어짜피 한번에 Theta와 X,Y를 Align하기는 어려운 것 같습니다. 그렇다면 Theta를 Align할 때 최대한 카메라 중심점으로 근접시킨후, 다시 한번 X,Y축으로 Align을 합니다.
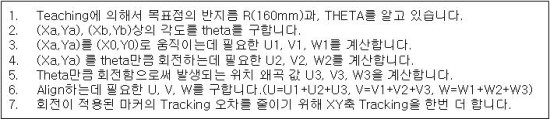
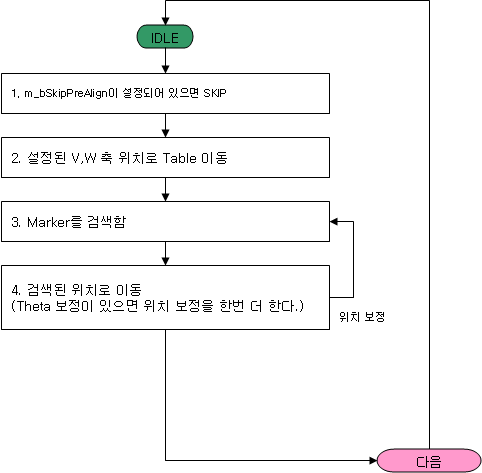
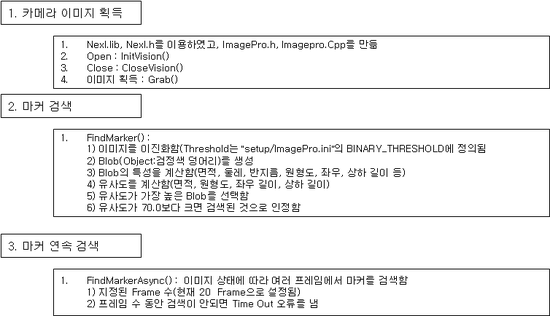
[구현]
1. 절차
'Motion제어' 카테고리의 다른 글
| DD Motor 장단점 (0) | 2014.02.18 |
|---|